Harmoni på legepladsen
For nogen tid siden var jeg ude at besøge Simultantolken — vi skulle lige have lagt nogle skumle planer om noget der måske bliver til et bogværk en dag — men det hører I i givet fald nærmere om. Imidlertid sker der jo det at hun på et tidspunkt må forlade huset kortvarigt, for at hente sin nørdling — jeg bliver udstyret med en kop kaffe, en nøgle, og en åben tilladelse til at lege1.
Efter at have drukket kaffen og filosoferet lidt over hvorfor man kan stikke et sugerør gennem en kartoffel hvis man holder for den ene ende når jeg frem til at jeg jo lige så godt kan give efter for mine dybtliggende impulser — og gå hen på legepladsen.
Dér finder jeg mange sjove ting og muligheder… men jeg bliver alligevel fascineret af en af de der fjeder-gyngeheste — i ved — sådan en hér:
Og jeg kom uvilkårligt til at tænke på at det jo med god tilnærmelse er (eller i hvert fald kunne være) en dæmpet harmonisk oscillator… Men hvordan måler eller karakteriserer man dét? Hmmm……
Man KUNNE jo gaffae eller stripse2 sin debilxylofon fast til sædet (eller hovedet (altså af hesten)) og sætte den i gang og så bruge accelerometeret — men det ER jo prøvet, og jeg havde ikke lige gaffa i lommen og kun de korte strips i tasken.
Hmmm… Hvis man nu bare optog den på video? Så kunne det jo være at man kunne bruge en af de hvide knopper, der sikrer at nørdlingerne ikke kommer til skade på bolte eller møtrikker, til at følge bevægelsen?
Jo, det må være en passende udfordring — jeg har også ønsket mig at lave noget mere billedanalyse.
Så — muligvis fik simultantolken efterfølgende nogle undrende henvendelser fra grundejerforeningen efterfølgende, men jeg trak/tvang/svingede altså hesten ud i yderposition, slap den så rent som muligt og kastede mig hed i græsset og startede en videooptagelse på min mobiltelefon. Den ser cirka sådan her ud:
Ja, det er jo lidt kedeligt og pletvist en anelse rystet… Altså videoen3. Den er også lidt pixelleret, men altså — originalen er 304MB — denne her er har jeg stampet voldsomt på…
Nå, men jeg har jo selv redt min billedanalyseseng, så jeg må jo hellere lægge mig i den…
Heldigvis har jeg tidligere bygget et lille program i Python til at lege interaktivt med nogle væsentlige parametre i billedanalyse, nærmere bestemt funktionen cv2.HoughCircles fra opencv billedanalysepakken, der kan — tadaaa… Finde cirkler i et billede.4
Jeg troede det letteste var at finde en af de hvide boltbeskyttere — og det var det også — det svære var at nøjes med at finde én af dem — og den samme hver gang. Så jeg endte med at finde hestens øje i stedet. Undevejs så et af mine adskillige aktive skriveborde således ud:
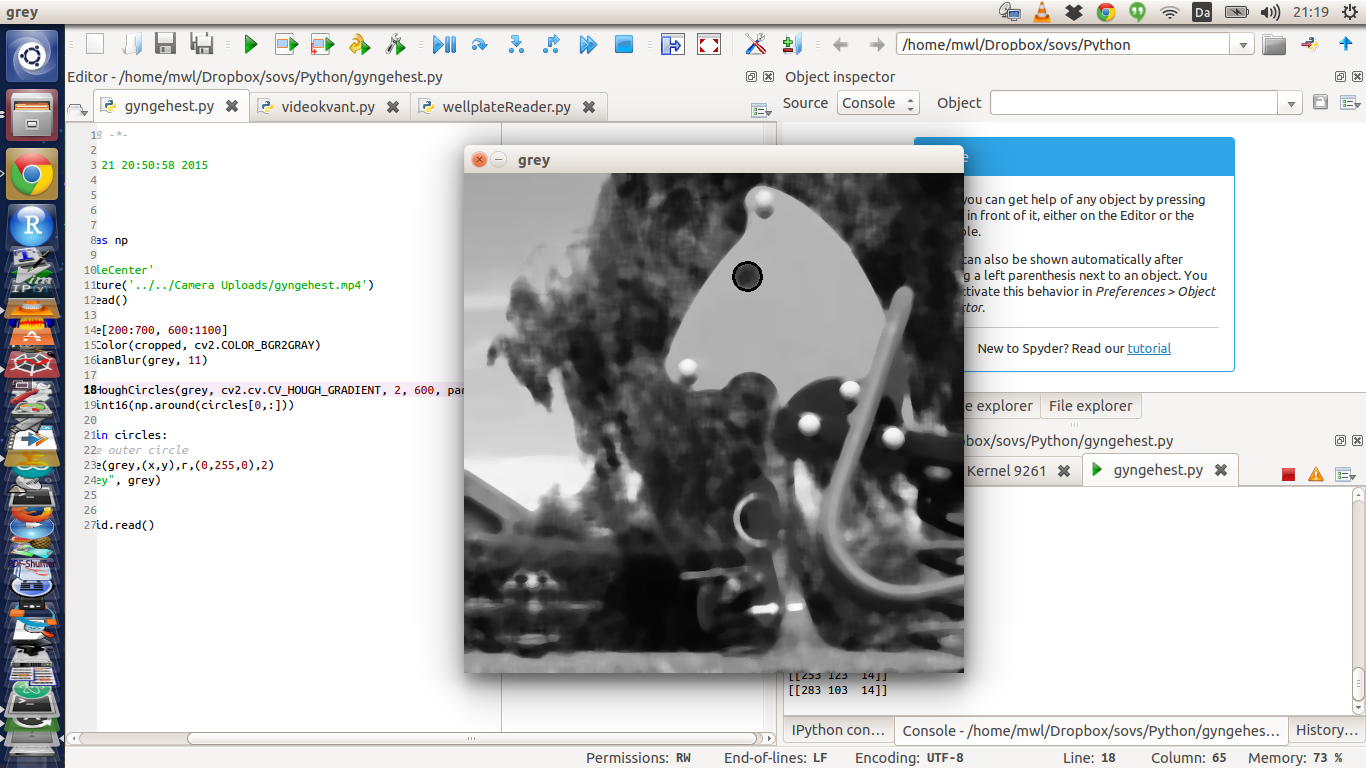
Bemærk at jeg er gået i sort-hvid og har beskåret billedet ret kraftigt. Det er fordi det giver et meget mindre datasæt at analysere, og kan således faktisk foregå i pseudo-realtid5 og uden at kræve menneskelig indgriben.
Og ja — de 20 linier pythonkode I ser i baggrunden var faktisk alt hvad det krævede at konvertere over 300MB video af en gyngehest til en flad tekstfil på ca 80kB der beskriver øjets position i hver eneste frame.
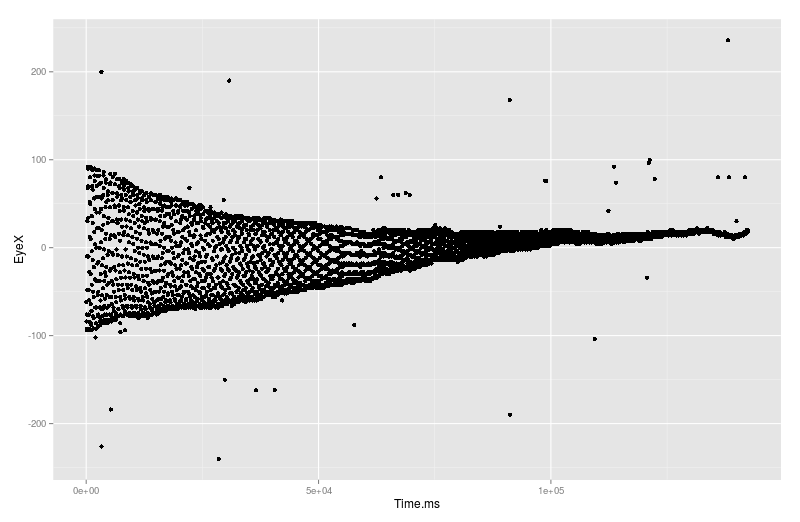
Udstyret med denne fil kunne jeg jo fyre op under R og forsøge at se om det gav noget brugbart — først tilføjede jeg lige en søjle med tiden i millisekunder — det er jo ret let at beregne, når man har 29.83 billeder i sekundet, så har man 33.52 ms per billede. R laver nogle udmærkede scatterplotmatricer til eksplorativ dataanalyse:
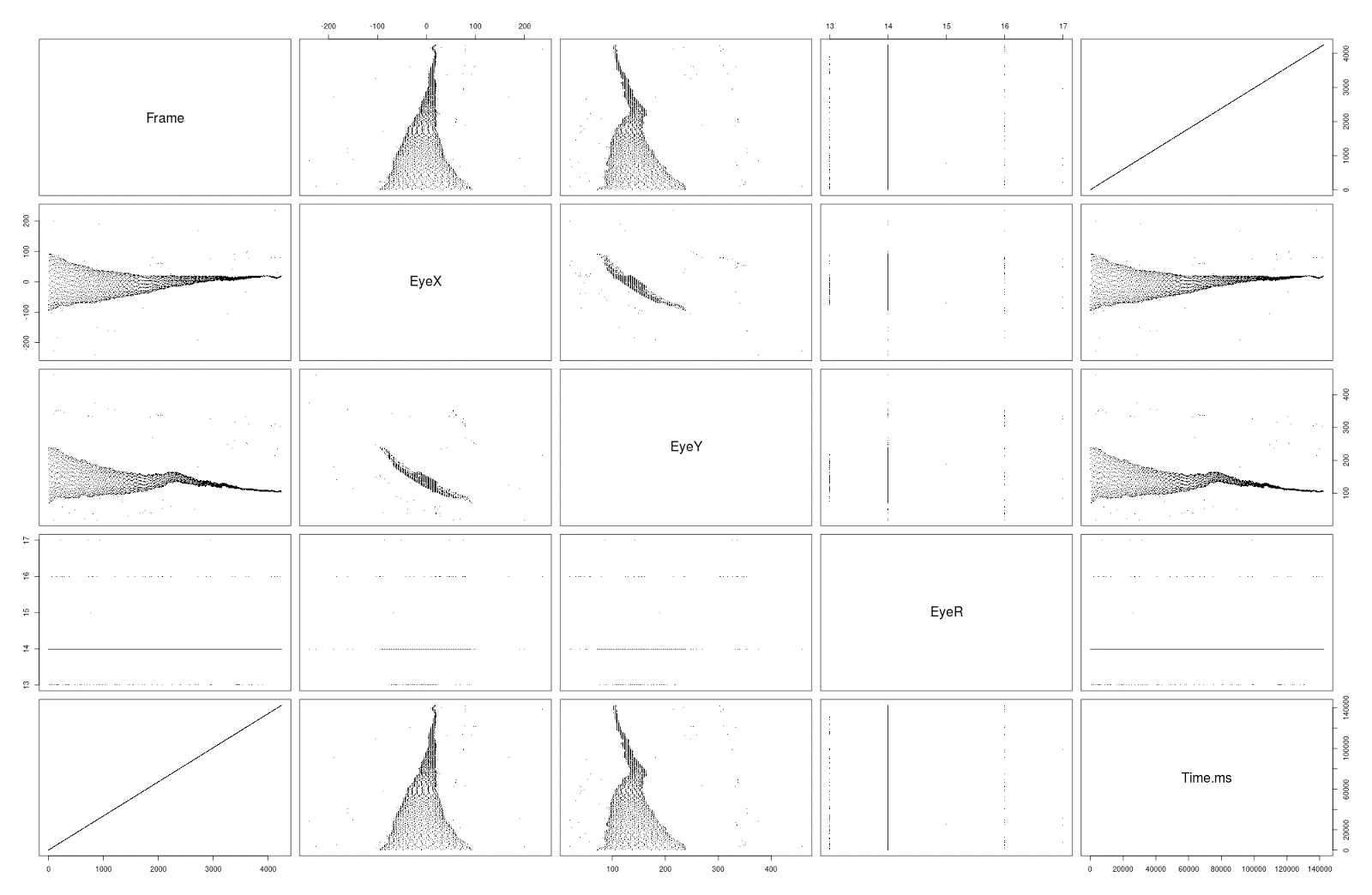
Ud af dette lidt rodede billede kunne man se at det faktisk var placeringen af øjet på X-aksen som funktion af tid, der var mindst påvirket af vind og vejr og rystende hænder - det er i hvert fald en pæn trompet-/jointform uden alt for mange knæk6
Så lad os isolere denne, centrere den om nul (trække middelværdien fra) og se på de første par sekunder:
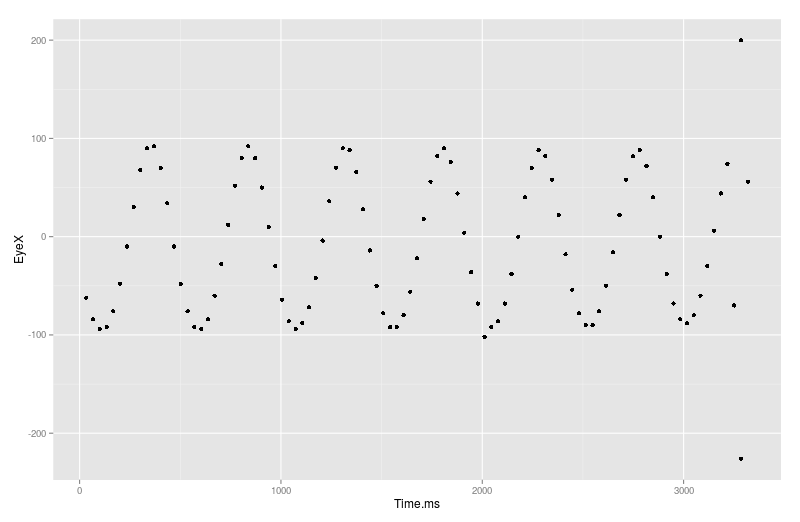
Og det er jo så smukt at man nærmest må knibe en tåre. Det er så ren en sinus/cosinus at man skulle tro jeg havde snydt.
Ser man på hele forløbet, så ser det sådan ud:
Og her kan man jo se følgende:
- Jo, der er nogle enkelte outliere, hvor algoritmen har fanget noget andet. De får lov at leve — de er så få at de ikke får stor indflydelse på fittingen af den beskrivende funktion
- Den lander ikke helt på nul og krummer en anelse — muligvis fummelfingret kameramand. Lad os se om vi slipper godt fra det.
- Det er svært at se her (men meget tydeligt hvis man zoomer) — men data fortætter med at have stort set samme frekvens, uafhængigt at amplituden — den er altså lige lang tid om at rokke en tur frem og tilbage, uanset om den næsten er nede at kysse jorden, eller om den bare står og rokker blidt. Det er jo netop i god overensstemmelse med teorien!
Okay, så — vi har nu noget der aftager asymptotisk mod nul: Amplituden, vi har noget der er konstant: Frekvensen, og så har vi et par skaleringsfaktorer (fase, og amplitudens maksimum) — så vi skal altså fitte et udtryk der ser cirkus sådan her ud: \[ EyeX=A \cdot e^{-kt}\cdot \cos(\tau\cdot t + \phi) \] Hvor EyeX altså er positionen af gyngehestens øje (i pixels), t er tiden (her i ms), A er det maksimale udsving, k er hastighedskonstanten — hvor hurtigt svingningen dæmpes, \(\tau\) er tidskonstanten for svingningen — hvor hurtigt går det for en hel svingning og \(\phi\) er fasen - der beskriver hvor på kurven svingningen starter.
Det var en længere svada, og jeg er da også glad for at jeg bare kunne fodre R med at jeg gerne villa have modellen til at se sådan ud og så kunne den finde konstanterne ved Nonlinear Least Squares optimering…
Troede jeg…
Det viste sig at når man har en dæmpet harmonisk svingning beskrevet ved 4248 punkter, så er der mange lokale minima, som sådan en algoritme kan falde ned i7, men lidt kælen for modellen8 og nogle rimelige startbetingelser gav et ret godt fit… Faktisk endte det med at se sådan her ud for de første 10 sekunder:
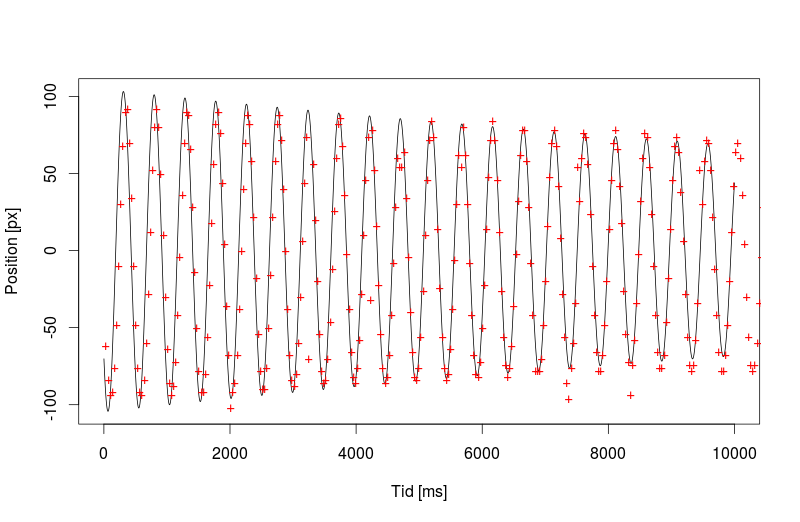
Her er de røde +’er data og den sorte kurve er model — den synes jeg godt jeg kan være bekendt.
Det bliver lidt værre når man zoomer ud og ser på det i sin helhed:
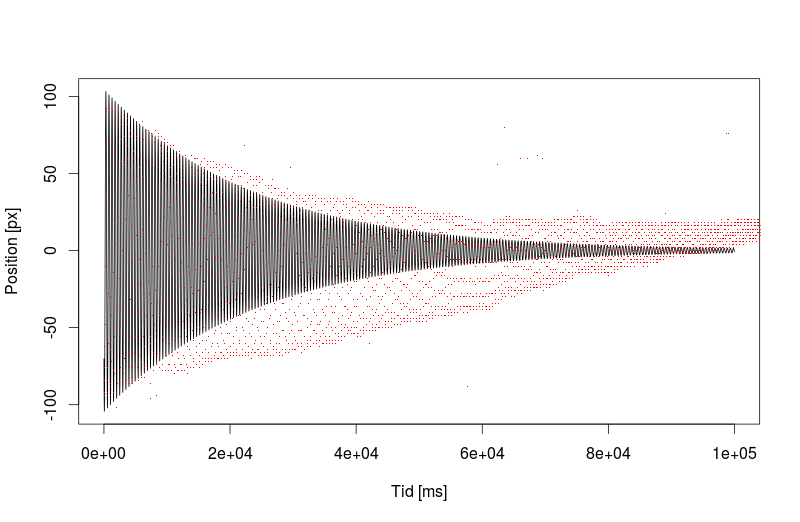
Her ses tydeligt at der er nogen afvigelse fra virkeligeheden når vi kommer ud over de første 20 sekunder, men ikke desto mindre er fase og frekvens stadig nogenlunde passende — og den er heller ikke HELT ved siden af i vurderingen af hvor længe der går før den klinger ud og står stille igen.
Jeg vil ikke trætte jer med parametrene, for de er ikke så vigtige i denne sammenhæng som det faktum at selv med disse ret primitive data: Håndholdt mobilkamera, tilfældig gyngehest, sat i gang med håndkraft, vind, vejr og vinkrelrethed er noget der bare må gå som det går, og jeres ikke spor ydmyge skribent har skullet ligge helt stille i adskillige minutter… og alligevel så kan man med 20 linier python og 10 linier R hive data ud og lave en helt anstændig model i løbet af en aftens tid.
Det har aldrig været lettere eller sjovere at være en nørd!
Som altid kan I få data, kildemateriale og kode, hvis I ikke synes det er sjovere at lave det selv…
\Worm
-
Letsindigt, ville nogen nok mene — altså tilladelsen til at lege — men når jeg har fået lov på forhånd, så er jeg jo på den anden side fri for at bede om tilgivelse bagefter. ↩
-
Jo, det er et ord. ↩
-
Og naboerne, muligvis. ↩
-
Jo, med nogle af de navngivningskonventioner jeg har set, så er det nødvendigt at specificere. ↩
-
Også kendt som “Hurtigt nok til at jeg ikke gider optimere yderligere” ↩
-
Så var det vel snarere et waldhorn eller en vandpibe. ↩
-
Lidt ligesom når man kører i grøften på vej hjem fra arbejde og ender med at være bankevissen, bare fordi øllerne er der — også selvom man skal i byen senere. ↩
-
Den numeriske model, altså. Den langhårede model er ikke hjemme. ↩